Sistem Navigasi Inersia Pengindeksan Dua Sumbu RLG




Deskripsi Produk
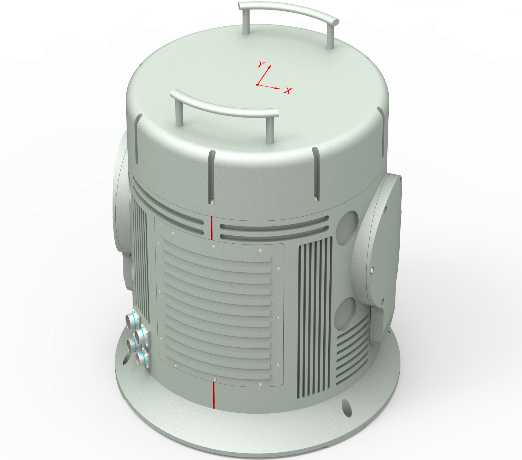
RL2-90 Sistem Navigasi Inersia, solusi mutakhir untuk navigasi yang akurat.Dilengkapi dengan giroskop laser cincin tipe 90 dan akselerometer fleksibel kuarsa, ini memberikan informasi kecepatan, posisi, dan sikap yang akurat.Ini terintegrasi dengan mulus dengan GNSS, altimeter, dan pengukur kecepatan udara, membuatnya cocok untuk operator udara dan darat.Baik di tank, kendaraan lapis baja, pesawat terbang, drone, kapal, atau rel kecepatan tinggi, sistem ini memastikan kontrol penerbangan, stabilisasi sikap, dan pemosisian yang andal.Dengan akurasi tinggi dalam navigasi inersia murni dan mode navigasi terintegrasi, RL2-90 adalah mitra tepercaya Anda untuk navigasi yang andal dan presisi di berbagai aplikasi.
PFITUR RODUK
l Mekanisme pengindeksan dua sumbu untuk mitigasi kesalahan
l Laser gyro cincin akurasi tinggi dan akselerometer kuarsa
l Penyelarasan mandiri dasar statis atau bergerak opsional
l Kalibrasi dan kompensasi parameter kesalahan dalam rentang suhu penuh
l Antarmuka input beragam opsional untuk GNSS/Odometer/DVL
l Mode navigasi yang dapat dikonfigurasi
l Kesesuaian lingkungan yang sangat baik
l Standar militer
AAREA PPLIKASI
l Navigasi kendaraan bawah laut
l Pemosisian dan pencarian utara untuk kendaraan darat
l Stabilisasi dan kontrol untuk pembawa yang bergerak
l Pengukuran sikap untuk aplikasi yang menuntut
MFUNGSI AIN
l Ini memiliki fungsi untuk mengeluarkan informasi seperti posisi pembawa, heading, sudut sikap, laju sudut dan kecepatan secara real time;
l Ini memiliki mode kerja seperti navigasi inersia murni dan navigasi terintegrasi INS / GNSS (termasuk Beidou);
l Memiliki fungsi menerima informasi navigasi satelit yang disediakan oleh peralatan standar frekuensi sistem waktu eksternal;
l Ini memiliki fungsi penjajaran diri tanah dan mendukung fungsi penjajaran udara;
l Ini memiliki fungsi seperti power-on self-test, periodik self-test, laporan status, kompensasi kesalahan instalasi, dan penyimpanan non-volatile.
PINDIKATOR ERFORMASI
| Akurasi sistem Akurasi Sistem | Navigasi Inersia Murni/Navigasi Inersia Murni | 2,0 mil/5 hari, PUNCAK | |
| Navigasi/Navigasi Terintegrasi dengan GNSS | ≤5m , 1σ | ||
| Sudut tajuk / Heading | 0,01°, RMS | ||
| Sikap horizontal (roll dan pitch) Sikap Horizontal (roll & pitch) | 0,005°, RMS | ||
| Kecepatan Inersia Murni | 1,0 m/s, RMS | ||
| Kecepatan navigasi terintegrasi GNSS | 0,1 m/s , RMS | ||
| Indikator dari perangkat inersia Parameter Gyro dan Akselerometer | giroskop laser _ Giroskop | Rentang / Rentang | ± 6 00 derajat/dtk |
| Stabilitas Bias | ≤0,002 derajat/jam, 1σ | ||
| Pengulangan Bias | ≤0,002 derajat/jam, 1σ | ||
| Non-linearitas Faktor Skala | 1 ppm | ||
| Akselerometer Akselerometer | Rentang / Rentang | ± 15g | |
| Stabilitas Bias | ≤10μg , 1σ | ||
| Pengulangan bias nol Pengulangan Bias | ≤10μg , 1σ | ||
| Non-linearitas Faktor Skala | 15 ppm | ||
| menyelaraskan waktu Waktu Penyelarasan | Mulai Dingin | ≤ 15 mnt | |
| Mengulang kembali | ≤ 10 mnt | ||
| Start Udara/Dalam-Penerbangan | ≤15 menit | ||
| Jam kerja Waktu operasi | Waktu kerja terus menerus/Waktu Operasi | lebih dari 10 jam | |
| Fitur Antarmuka antarmuka | Pasokan tegangan/Tegangan | 18~36VDC | |
| Konsumsi daya | ≤ 40W @ 24VDC | ||
| Antarmuka listrik / Listrik | RS232 × 2 RS422 × 3 BISA × 2 Ethernet × 1 1pps × 1 | ||
| Tingkat Pembaruan Data (dapat dikonfigurasi) | 200Hz@115.2kbps | ||
| Gunakan lingkungan Lingkungan | Suhu Operasional | -40°C~+65°C | |
| Suhu Penyimpanan/Suhu Penyimpanan | -55°C~+85°C | ||
| Gunakan Ketinggian/Ketinggian | 20000m | ||
| Kelembaban | 95% (+25°C) | ||
| Getaran / Getaran | 5g @ 20~2000Hz | ||
| Kejutan / Kejutan | 40 g, 11 ms, 1/2 Sinus | ||
| Properti fisik Fisik | Dimensi/ Ukuran (Φ*H) | 540x536mm | |
| Berat / Berat | 55 kg | ||
Catatan: Struktur dapat disesuaikan sesuai dengan kebutuhan pengguna.