Pengukur Jarak Laser 905nm-3500




SPESIFIKASI TEKNIS
| Parameter | Spesifikasi |
| Panjang gelombang laser | 905nm |
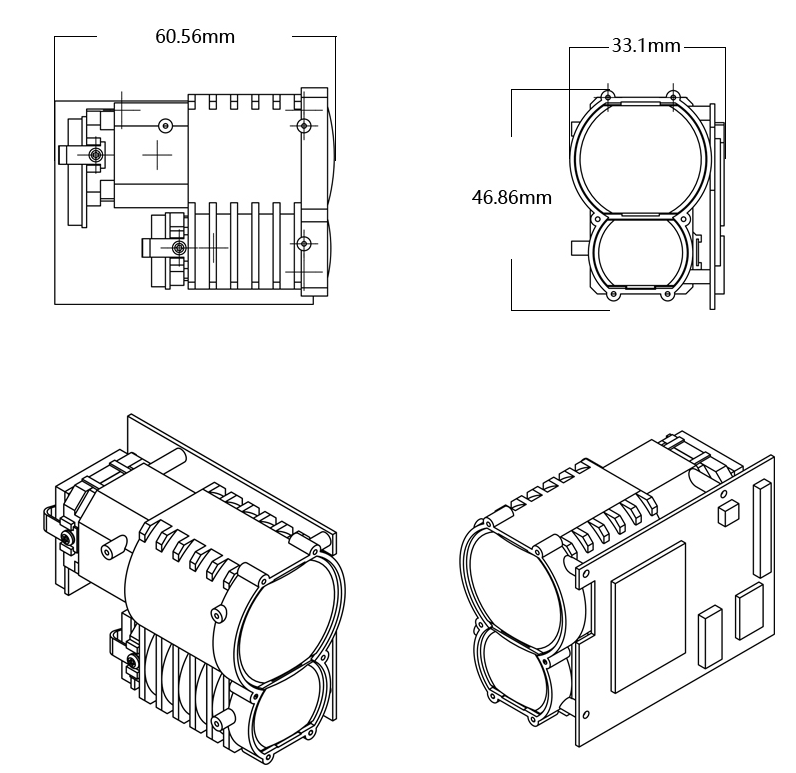
| Dimensi (mm) | 60,56*33,1*46,86mm |
| Kemampuan jangkauan | 5-3800m (nilai tipikal) 5-3000m dari hutan |
| Resolusi | ±0,1m |
| Bekerja saat ini | 80mA-123mA |
| Penyambung | RS232/TTL/485 |
| Suhu Operasional | -20º ~ 55º |
| Sinyal | Keluaran RS232/keluaran TTL/keluaran 485 |
| Tegangan masukan | 3~5V |
| Perbedaan | 5 mrad |
| Frekuensi Pengulangan (RF) | 1Hz |
| Kekuatan | <1mW(aman untuk mata) |
| Metode mulai | modus pulsa |
| Berat | ≤40g |